Fitur Produk
* Mengukur sinyal AC, DC dan pulsa.
* Akurasi luar biasa, linearitas bagus.
* Ketahanan yang kuat terhadap gangguan eksternal, rasio penolakan mode umum yang tinggi.
* Penyimpangan suhu rendah, konsumsi daya rendah, pita frekuensi lebar.
* Struktur terpisah, mudah dipasang.
Aplikasi Produk
* Pengaturan kecepatan konversi frekuensi AC.
* Traksi motor servo.
* Catu daya tak terputus (UPS).
* Mesin las, catu daya baterai.
Unduh Lembar Ukuran
 TR0214-LKH.pdf
TR0214-LKH.pdf
Parameter Produk
| Spesifikasi |
50A/4V |
200A/4V |
500A/4V |
Satuan |
saya PN |
Masukan Nilai Utama Arus |
50 |
200 |
500 |
A |
AKU P |
Arus Primer Rentang Pengukuran |
0-100 |
0-400 |
0-1000 |
A |
DI DALAM SN |
pengenal sekunder Tegangan keluaran |
4 |
V |
V C |
Catu Daya Tegangan |
±12-15(±5%) |
V |
saya C |
Konsumsi Saat Ini |
<25 |
mA |
V d |
Tegangan Isolasi |
Antara sirkuit primer dan sekunder: 2.5kV/50Hz/1 menit |
|
ε L |
Linearitas |
<1 |
%FS |
X |
Presisi |
TA =25℃:≤±1 |
% |
V0 |
Tegangan Offset |
TA =25℃:≤±20 |
mV |
DI DALAM OM |
Offset Magnetik Tegangan |
IP=0 setelah 3*I PN :≤±20 |
mV |
DI DALAM |
Tegangan Offset Penyimpangan Suhu |
IP =0 TA =-40-+80℃:≤±1 |
mV/℃ |
T r |
Waktu Respons |
≤5 |
μS |
F |
Bandwidth(-3dB ) |
DC-20 |
KHz |
TA |
Suhu Kerja |
-40-+80 |
℃ |
T S |
Suhu Penyimpanan |
-45-+85 |
℃ |
RL |
Ketahanan Beban |
TA =25℃:≥10 |
kΩ |
Struktur dan Dimensi
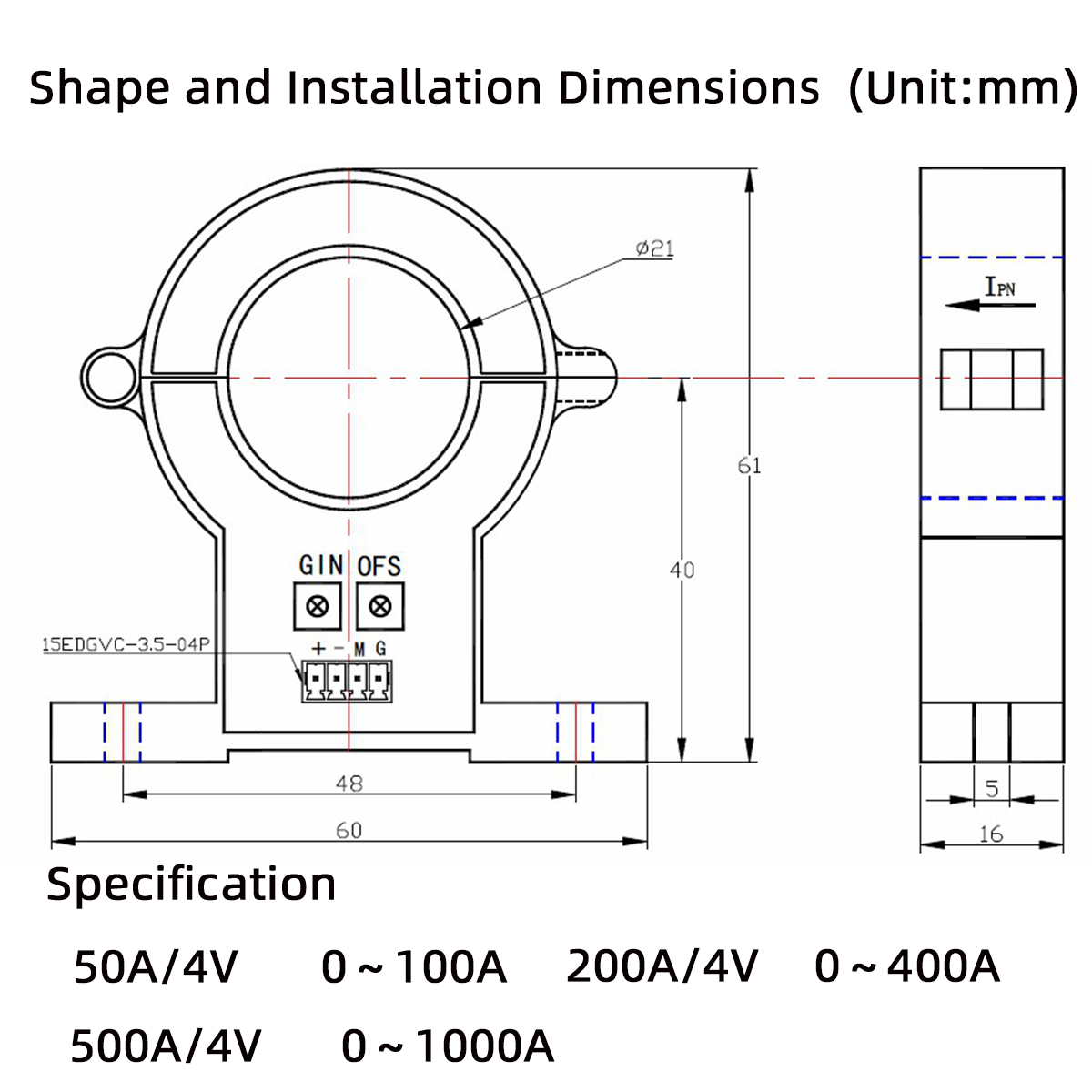
Diagram tautan sirkuit
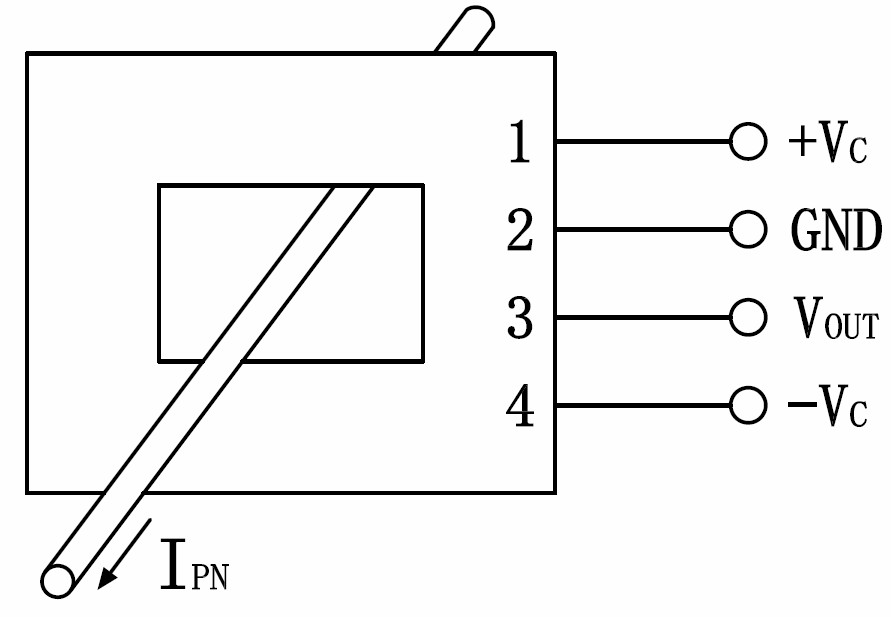
Catatan:
IPN: Arah masukan arus primer
+ : Catu daya 12V/15V positif
- : Catu daya negatif 12V/15V M : Output sinyal sekunder
G :Power ground OFS:Penyesuaian nol GIN:Penyesuaian amplitudo
Tindakan Pencegahan Instalasi
* Sensor harus dihubungkan dengan benar, jika tidak maka dapat merusak komponen internal sensor.
* Kinerja dinamis (di/dt dan waktu respons) paling baik bila baris masukan saat ini terisi penuh dengan perforasi utama.




































